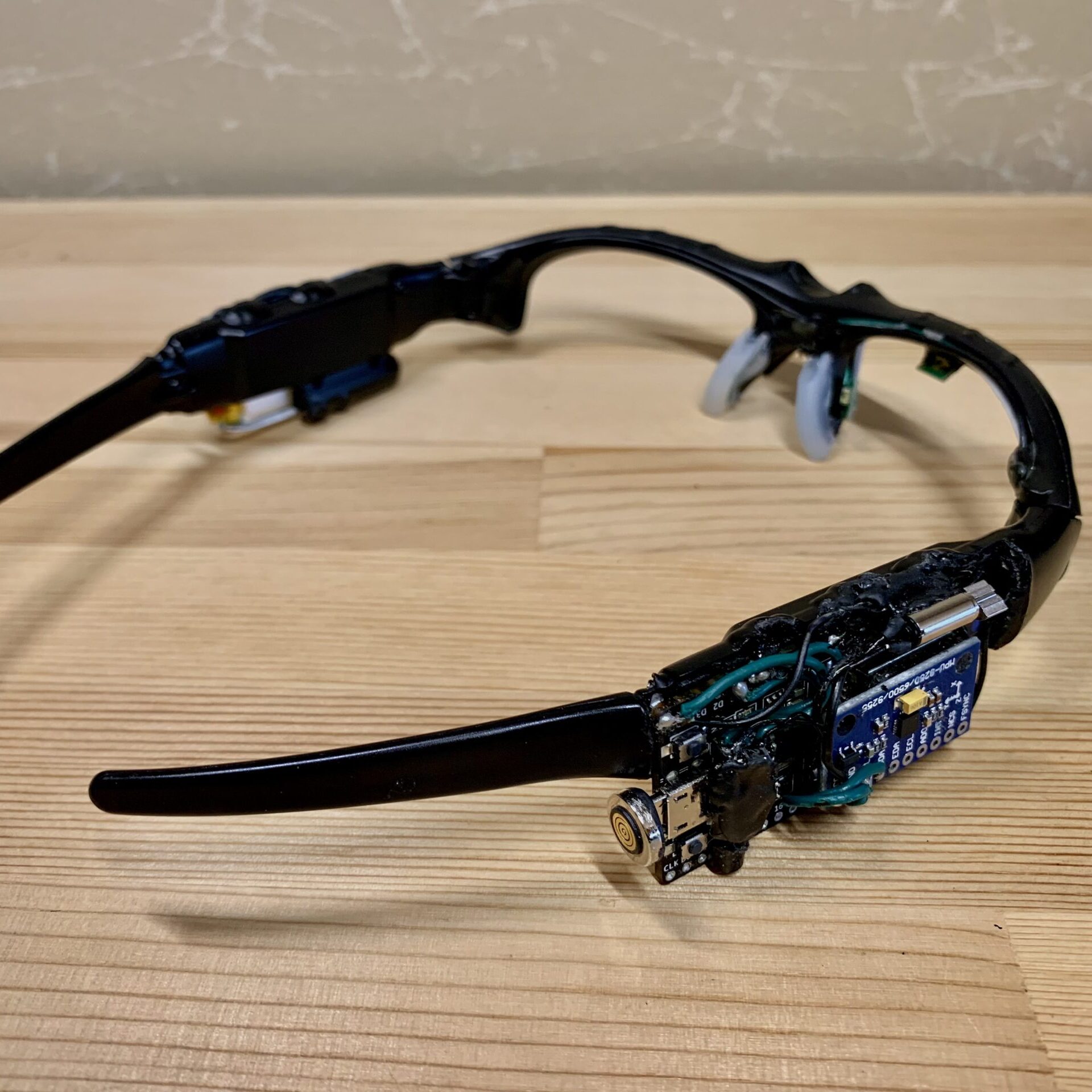
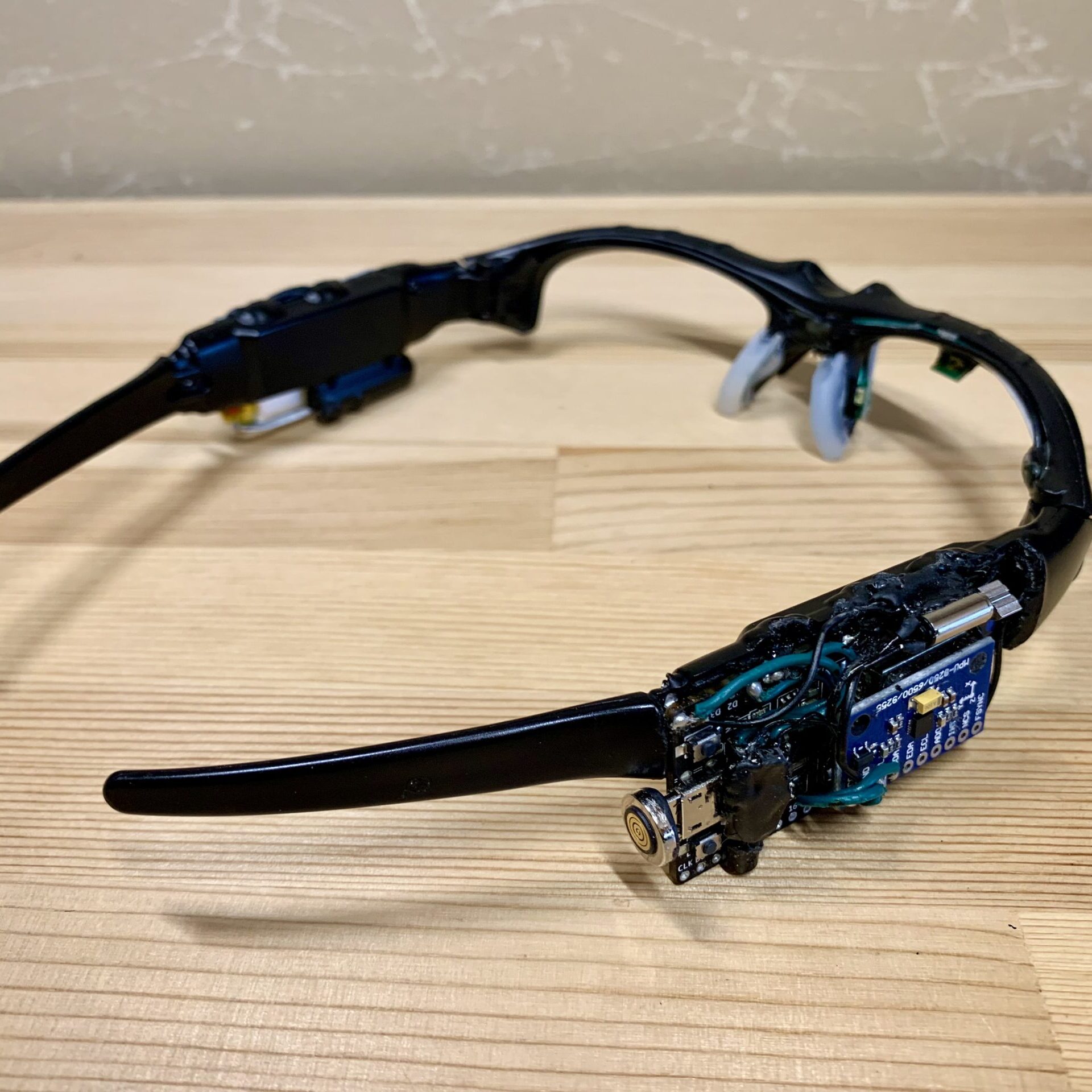
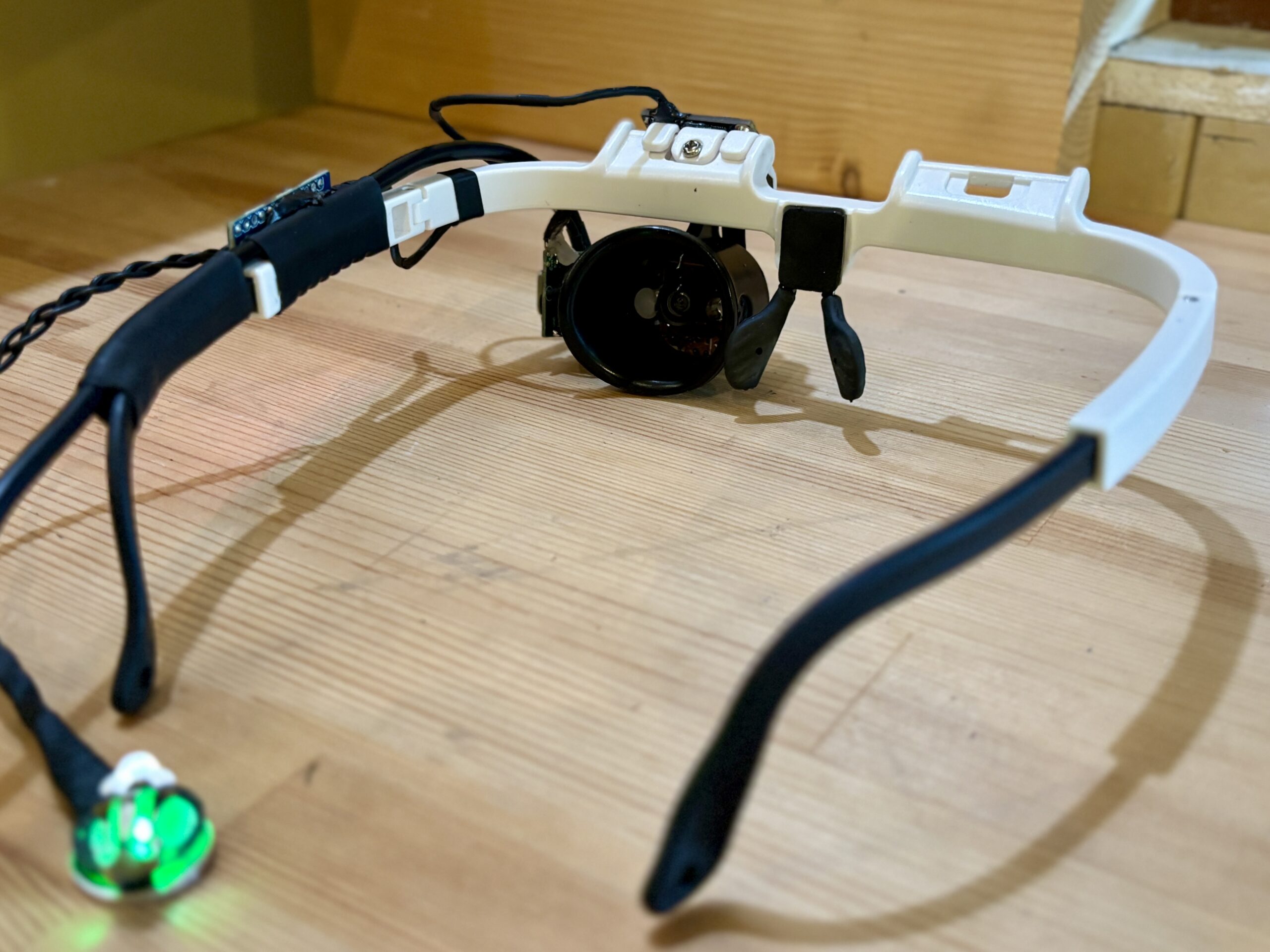
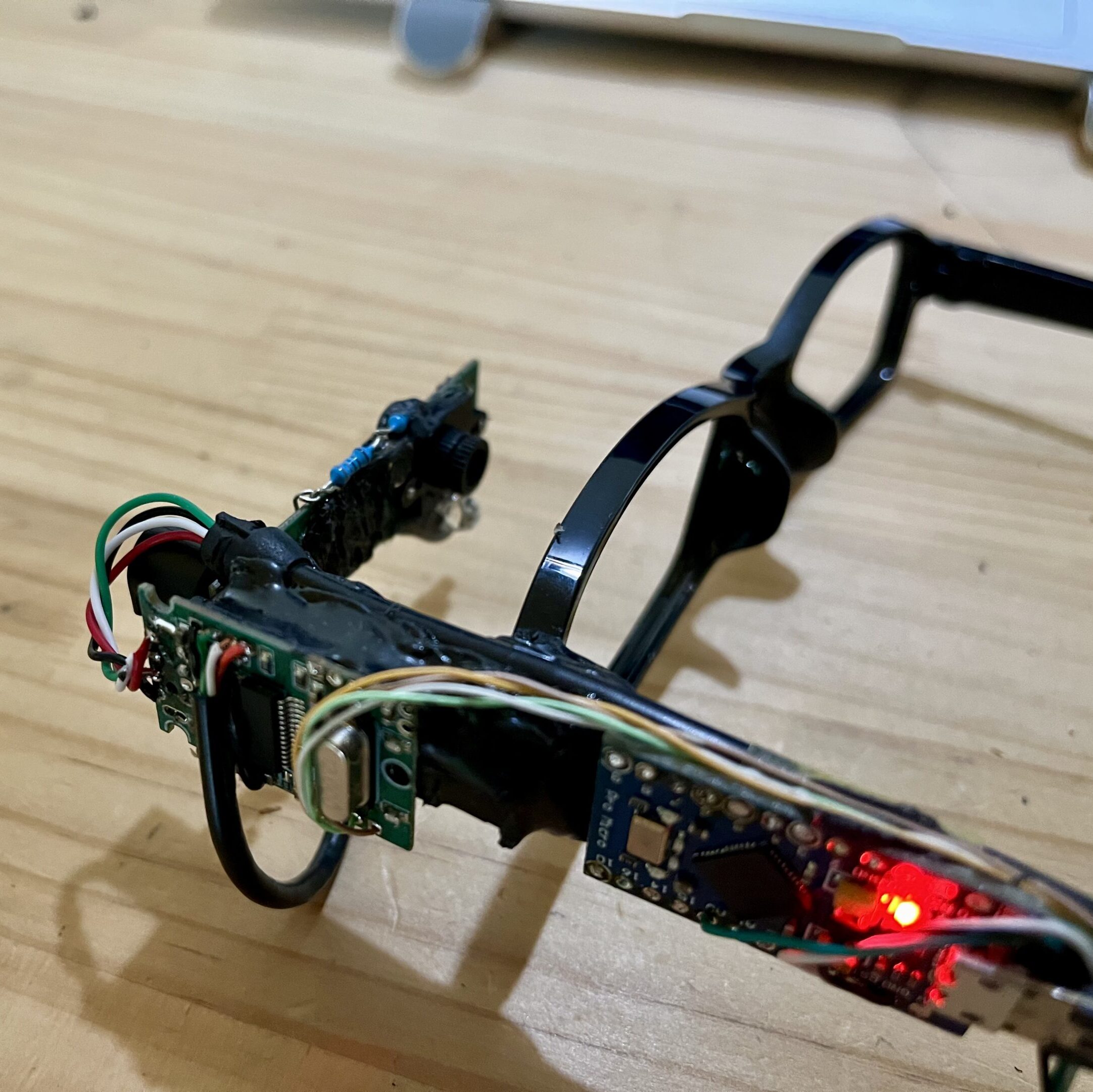
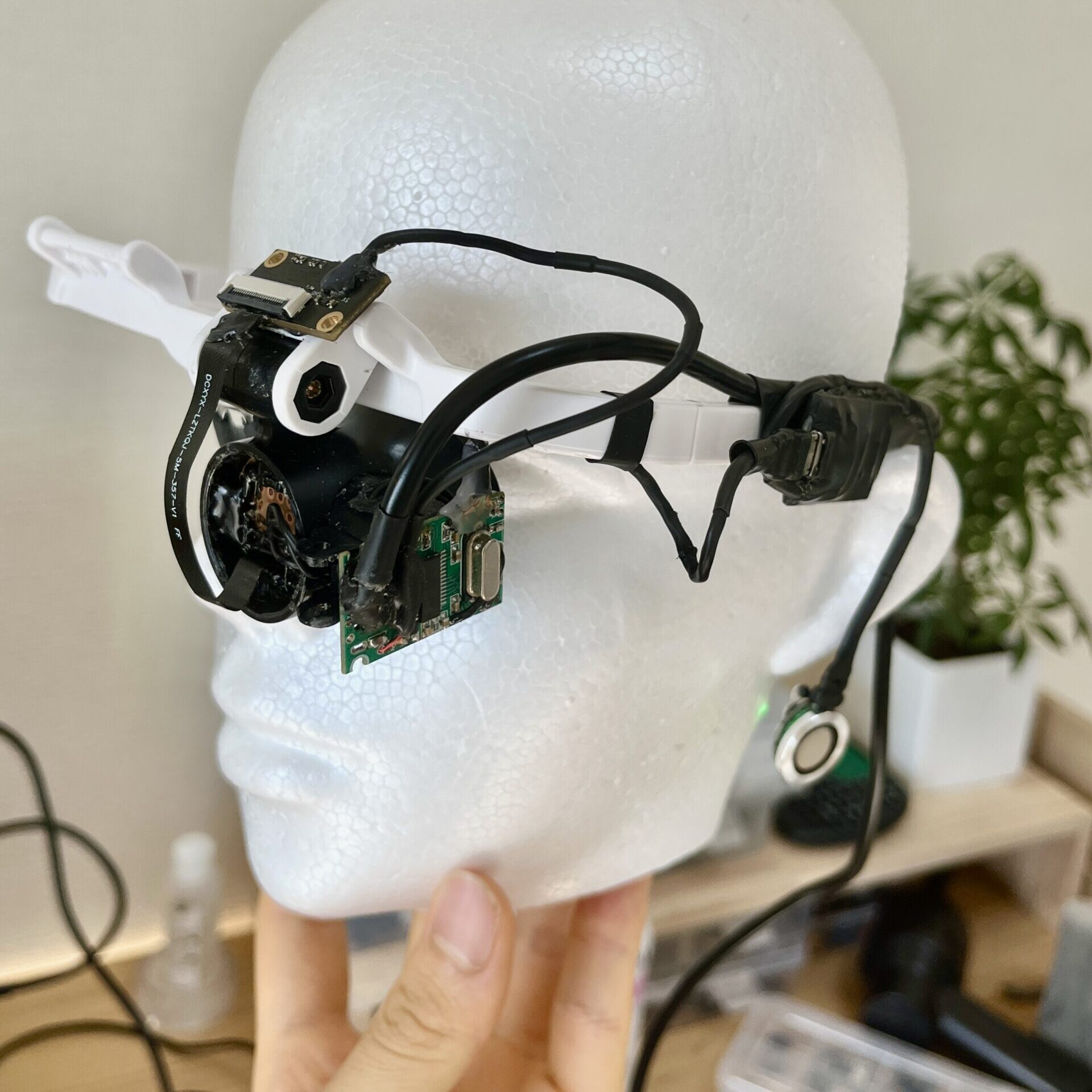
瞬きの検出は主にフォトリフレクターというものを使っている。これは赤外線を照射し、跳ね返ってきた赤外線の量を測ることによって、そのセンサーの前の物体の変化をパラメータで見ることができる。(マインクラフトでいうとかぼちゃ収穫の時に使うオブサーバーみたいなやつ。)目の前にそれをつけ、目を閉じるとまぶたによって赤外線反射量が増えるのでそれを瞬きとして検出する。瞬きをすると、その瞬間に短いバイブレーションが起こる。
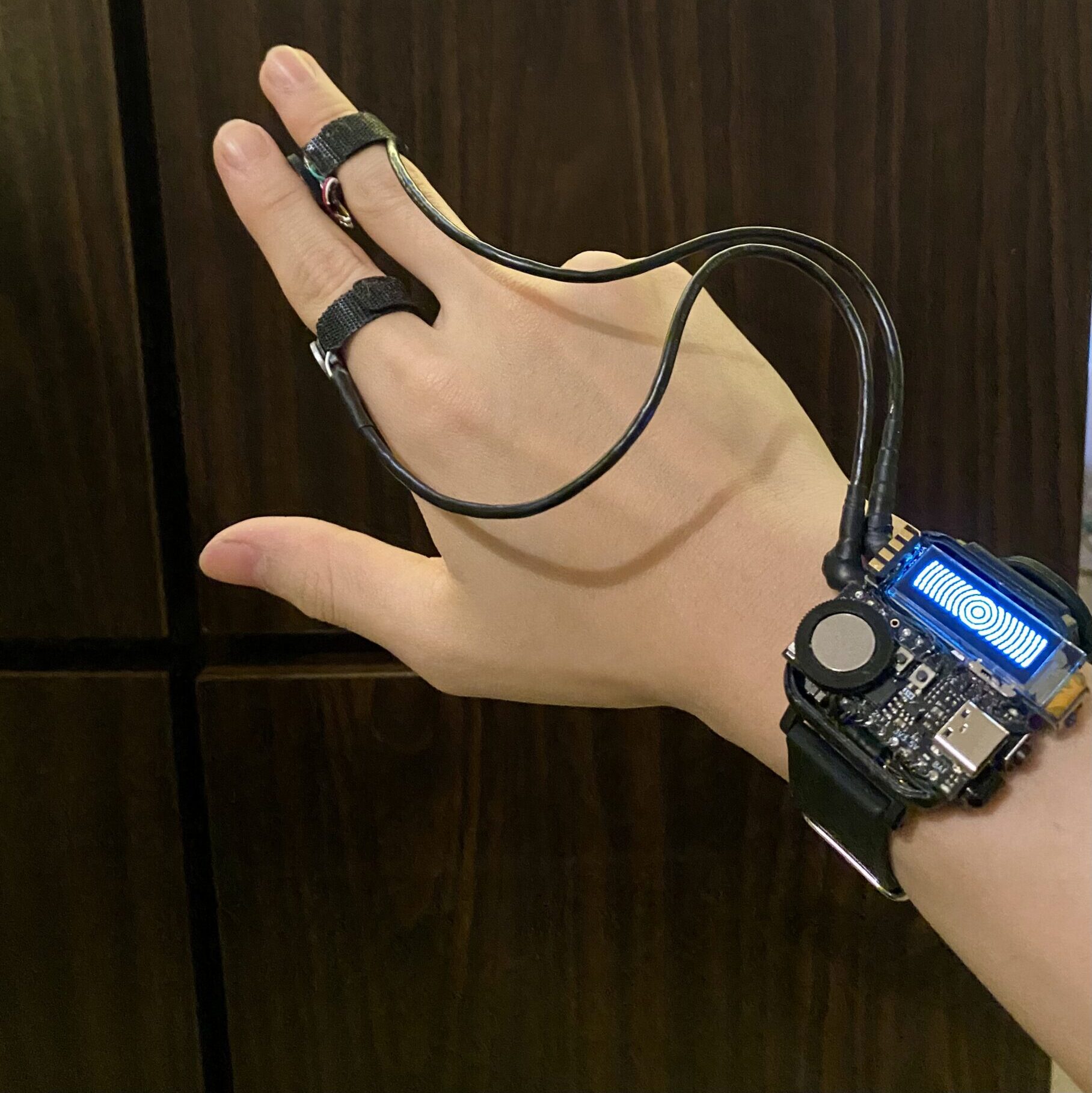
一回の瞬きでクリック、2回の瞬きでスクロールモードに入りカーソルの動きが止まり、その状態で上下左右のスクロールが可能となる。
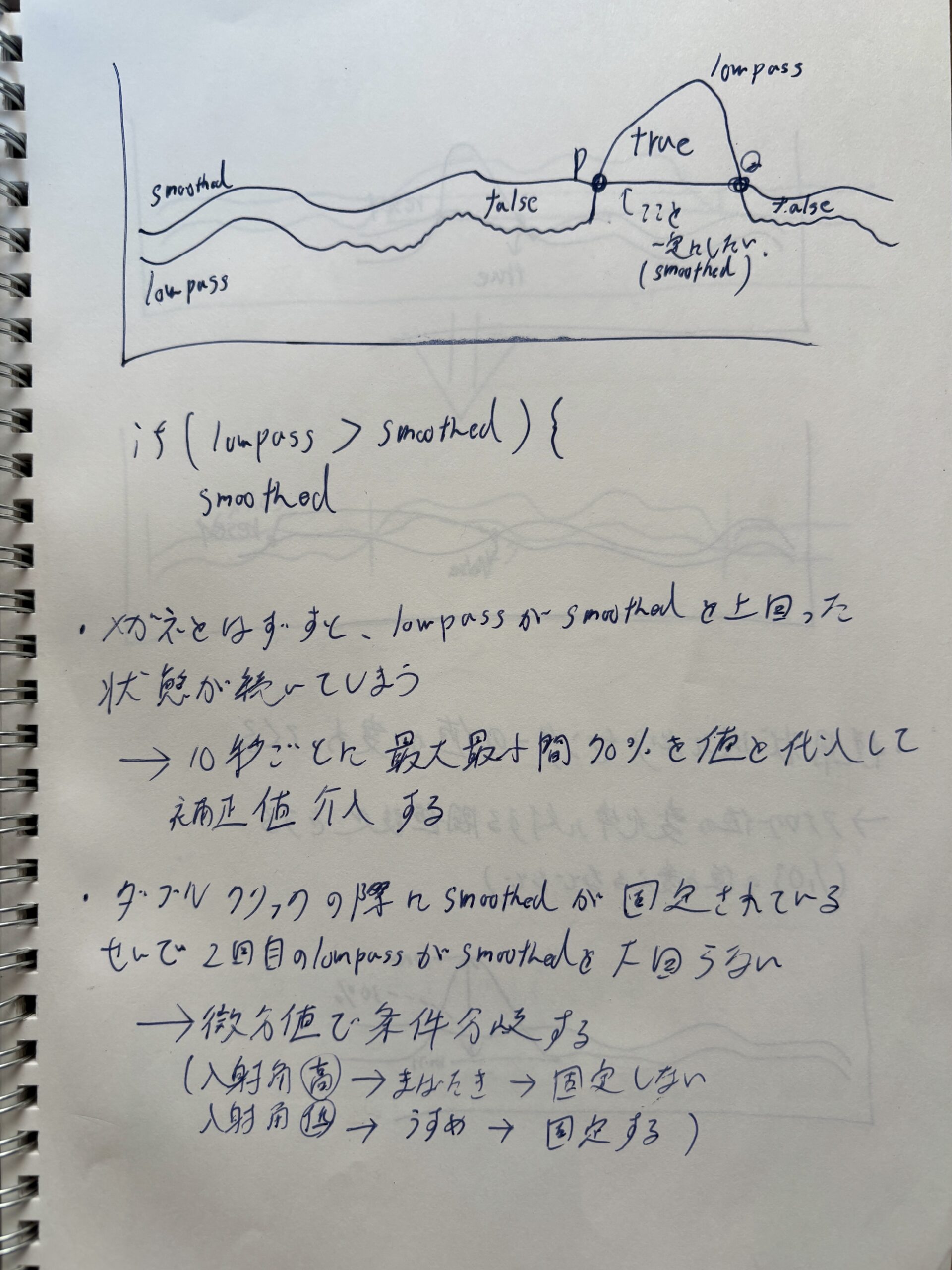
フォトリフレクターもタッチセンサーと同様ノイズに弱いため、移動平均法を使った適応型閾値処理を組んだ。加えてこれは赤外線センサーのため環境光、特に日光の影響を強く受ける。そのため、カーソル操作時の頭を動かした際の流入日光量の変化も平滑化させた。

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}